System Overview
To achieve the required accuracy, our system goes through two stages of alignment. In the first stage, an ultrasonic range finder is used to find the front corners of the car and a rough secondary coil position is calculated. An RFID reader and RFID tags mounted to the underside of the car are used to fine tune the alignment in the second stage. The same ultrasonic sensor used for coarse alignment is also use to detect when a car parks and when the car leaves. We used hierarchical state machines to implement this solution in code. The main state machine (Magic Smoke Machine) controls the progression through alignment and charging and calls embedded state machines for coarse and fine alignment.
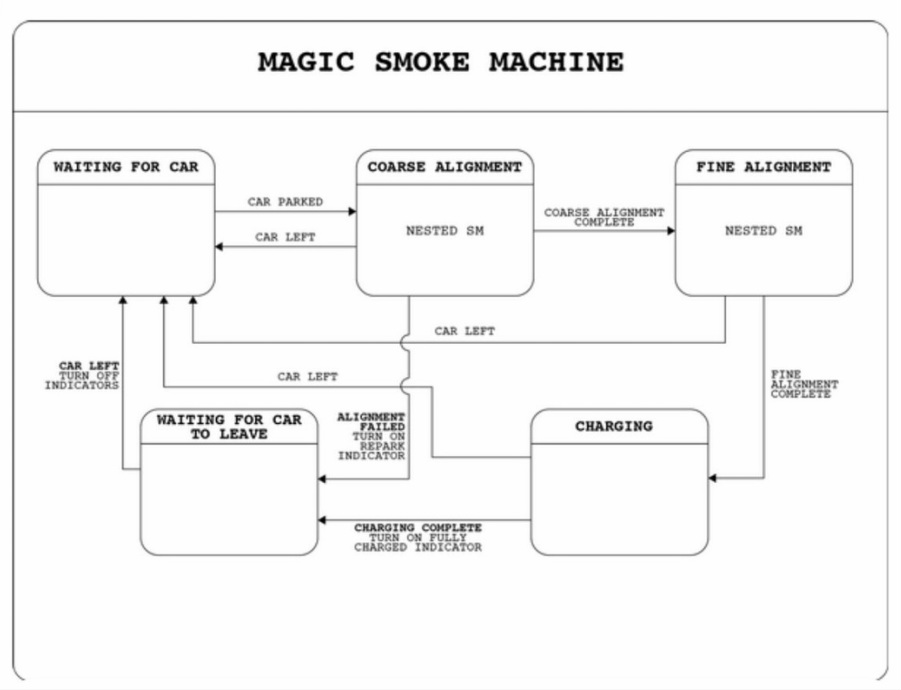
Main State Machine
Upon start up and reset, the state machine initializes all peripherals and enables interrupts. It then enters a WAITING FOR CAR state, which uses the ultrasonic range finder (URF) to determine if a car has parked. Once a car has been detected and the URF reads a consistent range for a predetermined time period, the state machine enters the COARSE ALIGNMENT state. Once coarse alignment is complete, the state machine enters FINE ALIGNMENT. When alignment is complete, the primary coil should aligned be within specifications to the secondary coil. At this point, the charger can begin charging the vehicle. Once charging is completed, the state machine waits for the car to leave the parking spot. After the car leaves, the state machine returns to WAITING FOR CAR. If at any point the URF has detected that the car has left the parking spot, the state machine returns to WAITING FOR CAR.
Please select one of the sub-pages form the menu above to learn more about our solutions for coarse and fine alignment.
