Ultrasonic Range Finder

We used the MaxBotix MB7052 ultrasonic range finder to sense when a car entered the parking spot and to do coarse alignment on the front trim of the car. This robust sensor is weather resistant and is able to filter the signal for the "most likely target," rejecting rain, snow and other sources of noise. With a broad range of 20-765 cm and a 3/4" NPT thread for PVC pipe fittings, the sensor was ideal for our purposes and easy to prototype with.
The output of the sensor was similar to UART protocol with an active high signal. In order to read the signal using the LM3S2965 UART registers, we inverted the URF signal through a comparator. The signal is an 8-bit ASCII 'R' followed by three ASCII numerals corresponding to the range in cm.
The output of the sensor was similar to UART protocol with an active high signal. In order to read the signal using the LM3S2965 UART registers, we inverted the URF signal through a comparator. The signal is an 8-bit ASCII 'R' followed by three ASCII numerals corresponding to the range in cm.
URF Mount
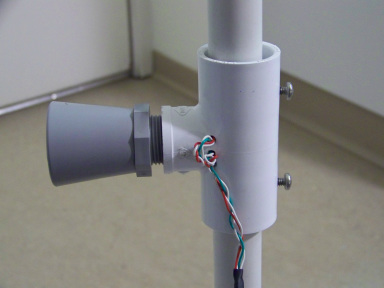
The URF mount consisted of a 1/2" NPT PVC framing with a 3/4" NPT T-connector to house the sensor. This T-connector could slide vertically on the pipe, allowing for height adjustment, and tightened down using a pair of screws through tapped holes in the T.
Sweeping the sensor was accomplished using a Futaba 180 degree range standard servo. The servo was mounted on a flanged 1/2" NPT pipe end and held in place with metal brackets. A custom servo horn to PVC adapter rotated the upper section of the mount.
Sweeping the sensor was accomplished using a Futaba 180 degree range standard servo. The servo was mounted on a flanged 1/2" NPT pipe end and held in place with metal brackets. A custom servo horn to PVC adapter rotated the upper section of the mount.

|

|
